Elin Gammelli
Generalist Programmer and Technical Artist
Icicl Engine
Icicl Engine (ECS)
This engine was developed over 16 weeks, with a fair amount of cut corners to make make it within 16 weeks. You can play the Demo including with the Editor from the Release tab on Github. The engine is built with OpenGL and EnTT as it's core building blocks, aswell as multi-threading as a pillar. The intention was to explore ECS and data oriented design, to have a better understanding of Unity DOTS and UE5 Mass. In the parts of the engine where performance matters, I tried to keep data and cache locality in mind, but the editor is built ontop of weak/shared pointers and in an object oriented way, and runs much slower than engine in play mode.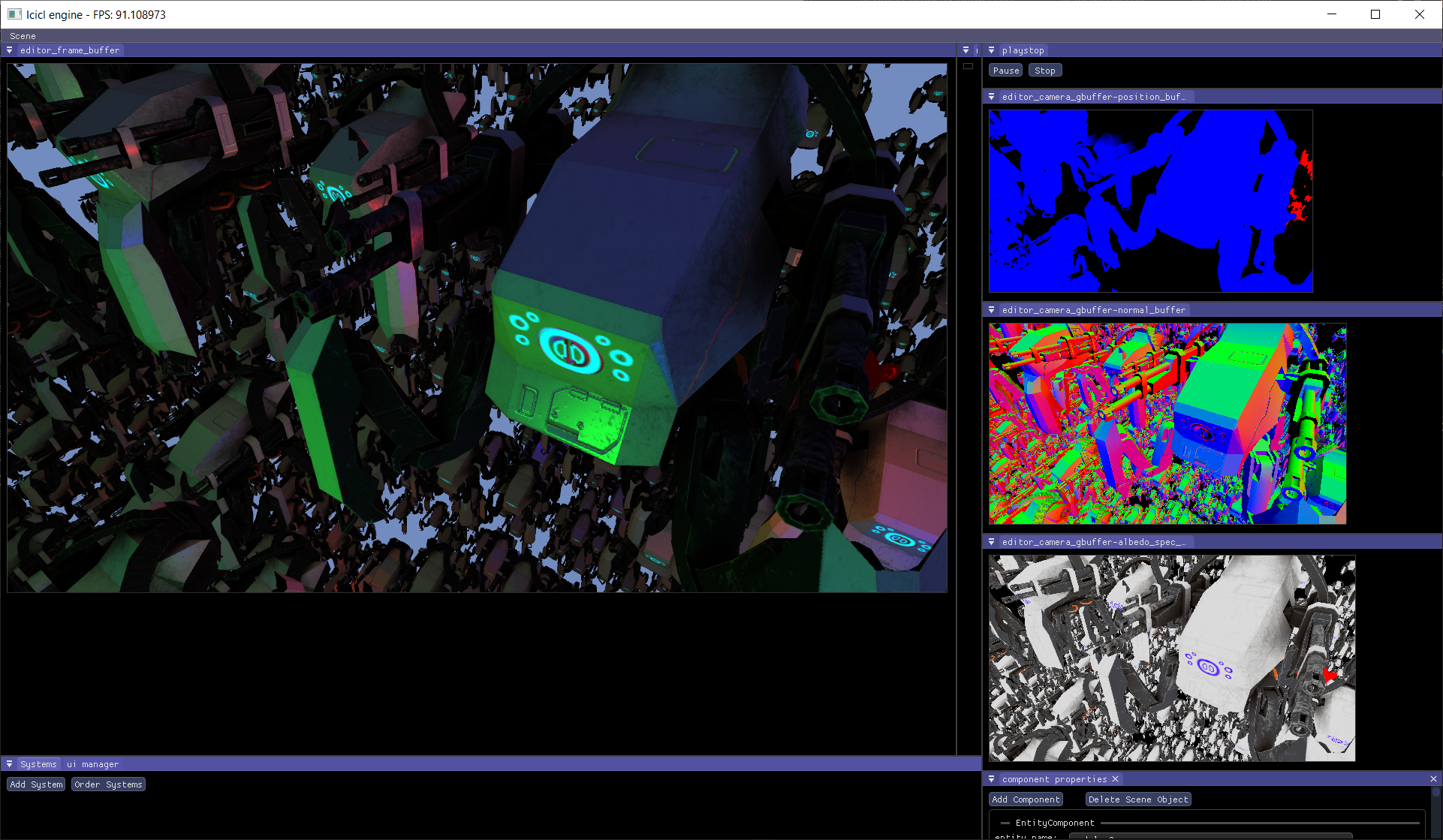 The renderer is a deffered renderer, and runs on a seperate render thread, rendering the data supplied by the main game-thread of the previous frame.
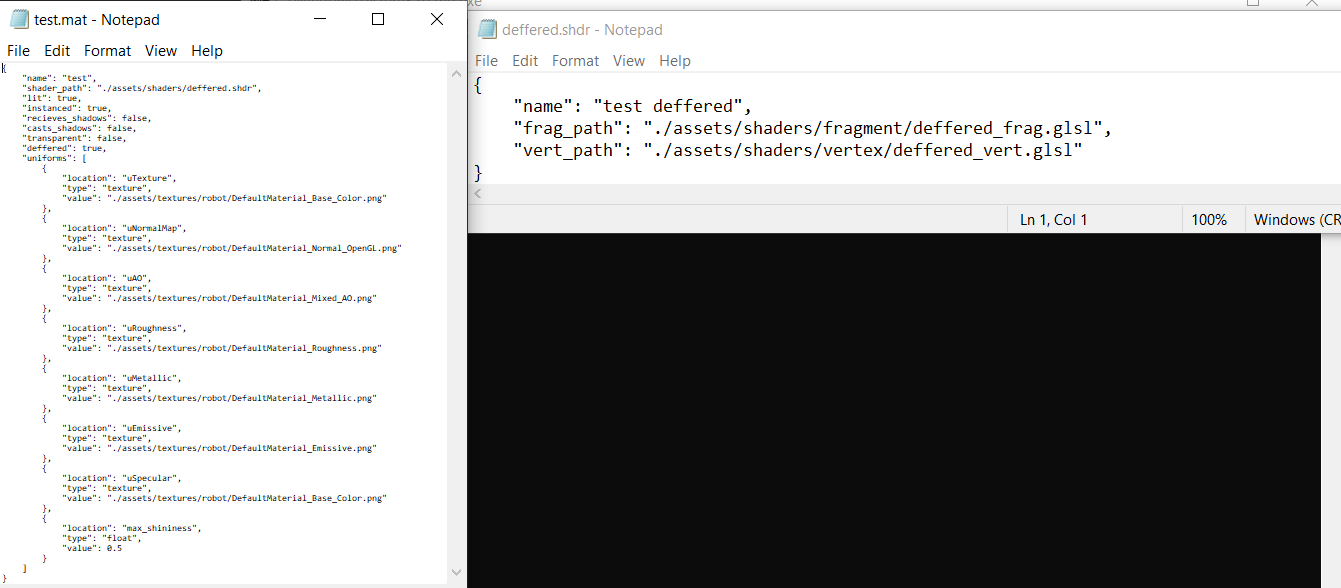
Asset loading such as .obj, textures, my .shdr and .mat files uses multi-threading, and stores "runtime mesh" and "runtime material" in a sorted vector, for cache friendly access when generating render calls. The render thread iterates through the generated 'render requests' and 'runtime materials' to in a O(N + M) forloop and automatically instances meshes/materials that can be, and markted to be, instanced.
The runtime materials can be modified by systems/functions ingame, such as changing float values. The asset loading only supports .obj models.
The renderer is a deffered renderer, and runs on a seperate render thread, rendering the data supplied by the main game-thread of the previous frame.
Asset loading such as .obj, textures, my .shdr and .mat files uses multi-threading, and stores "runtime mesh" and "runtime material" in a sorted vector, for cache friendly access when generating render calls. The render thread iterates through the generated 'render requests' and 'runtime materials' to in a O(N + M) forloop and automatically instances meshes/materials that can be, and markted to be, instanced.
The runtime materials can be modified by systems/functions ingame, such as changing float values. The asset loading only supports .obj models.
 To prevent the 'user/programmer' from making critical mistakes, I created a systems wrapper, which is an interface for the 'user/programmer' to be able to enqueue systems/functions that act on a set of components, without gaining access to core entt objects.
To prevent the 'user/programmer' from making critical mistakes, I created a systems wrapper, which is an interface for the 'user/programmer' to be able to enqueue systems/functions that act on a set of components, without gaining access to core entt objects.
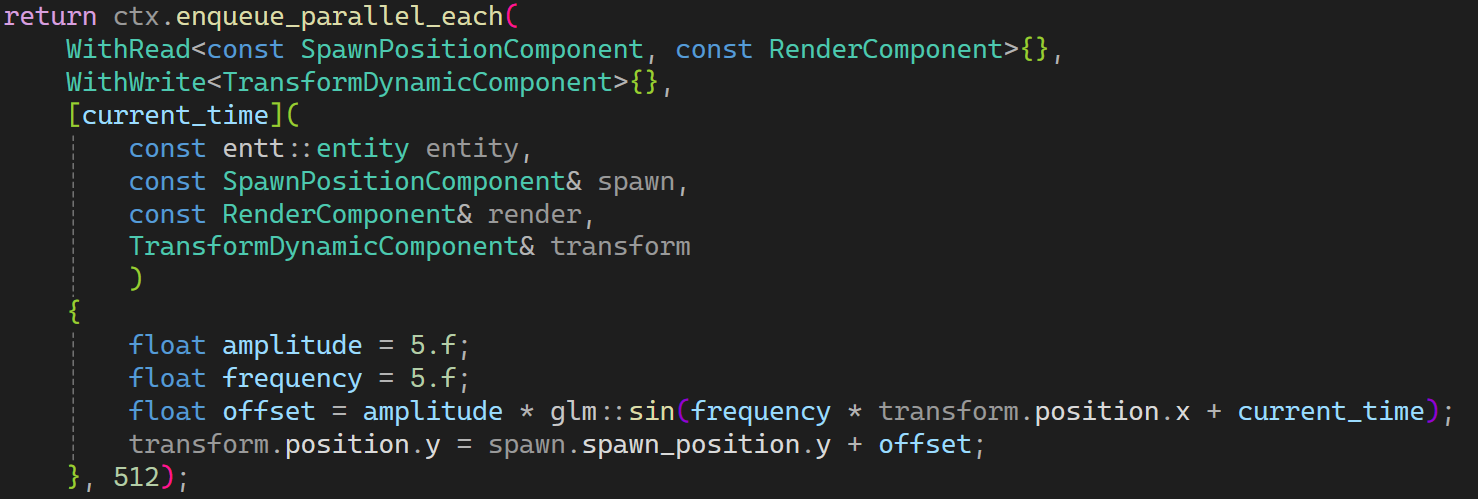 The systems wrapper allows to query for entities with specificed components as read or write, exclude entities with specified components, and mark components for other access and modification.
Systems can either be one a single thread, as "each", or an another thread as "enqueued each", or on multiple threads of either a set number of threads, or by chunk sizes, through "enqueue parallel each".
There's also a Systems context storage, which stores data in a thread-safe Systems context objects, in a map. This can then be accessed to create data that other systems may use at a later stage.
The systems wrapper allows to query for entities with specificed components as read or write, exclude entities with specified components, and mark components for other access and modification.
Systems can either be one a single thread, as "each", or an another thread as "enqueued each", or on multiple threads of either a set number of threads, or by chunk sizes, through "enqueue parallel each".
There's also a Systems context storage, which stores data in a thread-safe Systems context objects, in a map. This can then be accessed to create data that other systems may use at a later stage.
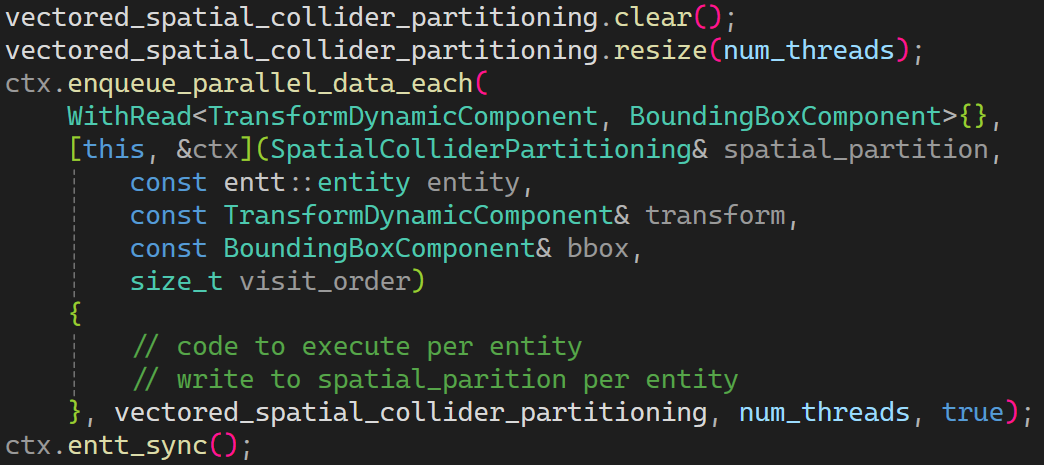 To complement the Systems Context Storage, there's also a "enqueue parallel data each", which allows for data as an input, aswell as entity iteration order. That way, the 'user/programmer' can read data in parallel, then launch parallel threads (with an enqueue for the worker pool) to process the data, to then iterate through those same entities to write the data back.
Since writing to components that are already being read or written to causes data race, the Systems Wrapper automatically registers and detects read/write collisions, and forces a thread syncronization before letting the system start.
There's an entity component creation/destruction buffer, which allows the user to create, or remove entities, and delete, or add components to existing or new entities, which is executed at a later synced state to avoid data races.
To complement the Systems Context Storage, there's also a "enqueue parallel data each", which allows for data as an input, aswell as entity iteration order. That way, the 'user/programmer' can read data in parallel, then launch parallel threads (with an enqueue for the worker pool) to process the data, to then iterate through those same entities to write the data back.
Since writing to components that are already being read or written to causes data race, the Systems Wrapper automatically registers and detects read/write collisions, and forces a thread syncronization before letting the system start.
There's an entity component creation/destruction buffer, which allows the user to create, or remove entities, and delete, or add components to existing or new entities, which is executed at a later synced state to avoid data races.
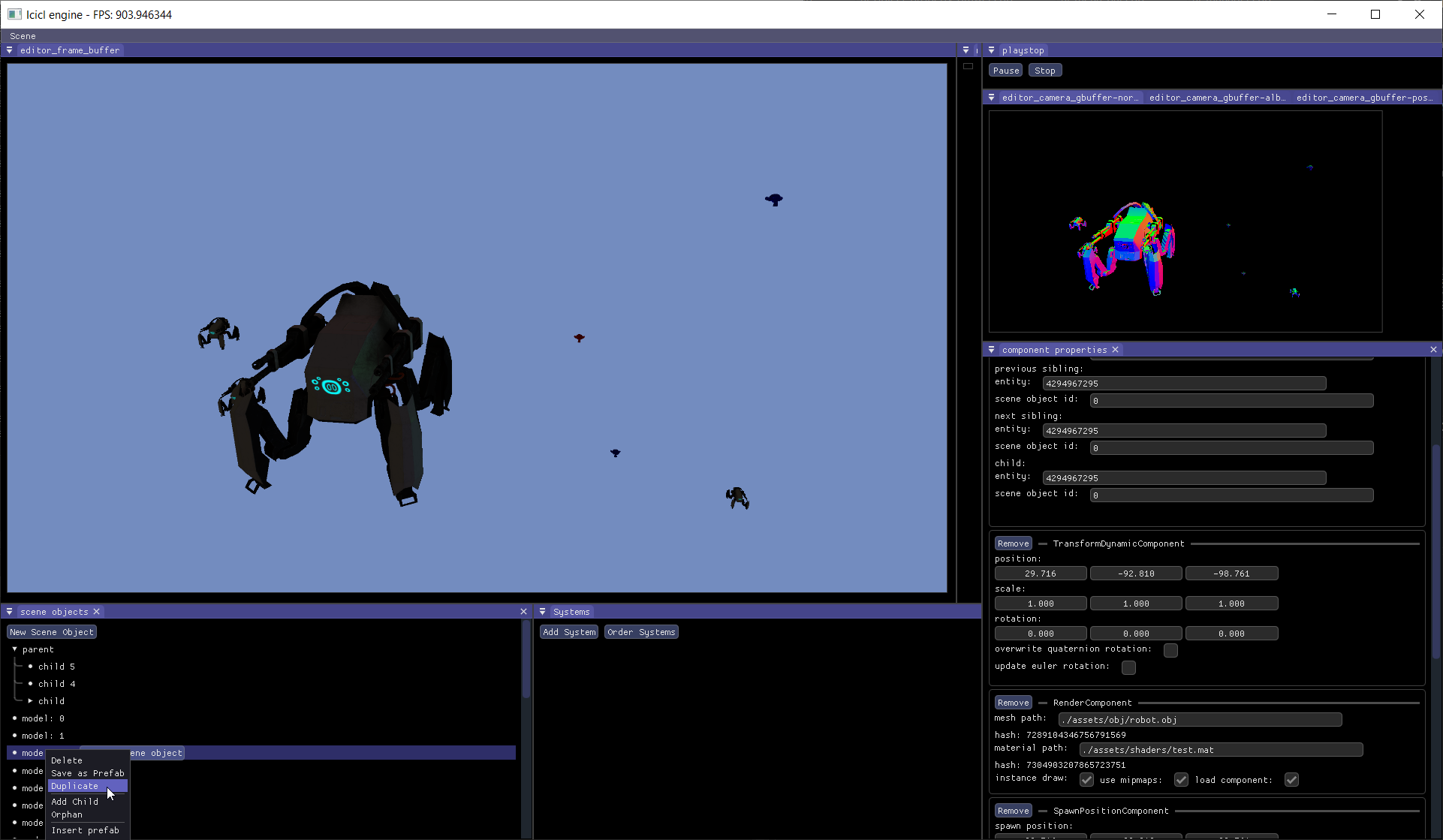
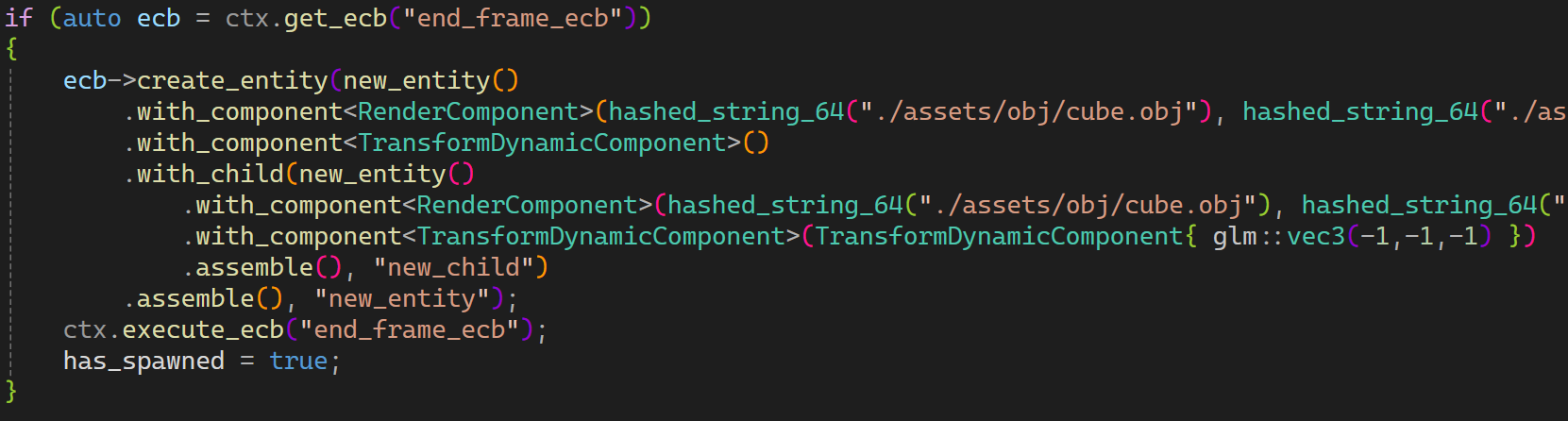 The editor itself is very rudimentary, but has some of the essential necessities. Such as 'prefabricates', duplication, parenting hierarchy, secene saving and loading, and component modification.
The editor itself is very rudimentary, but has some of the essential necessities. Such as 'prefabricates', duplication, parenting hierarchy, secene saving and loading, and component modification.
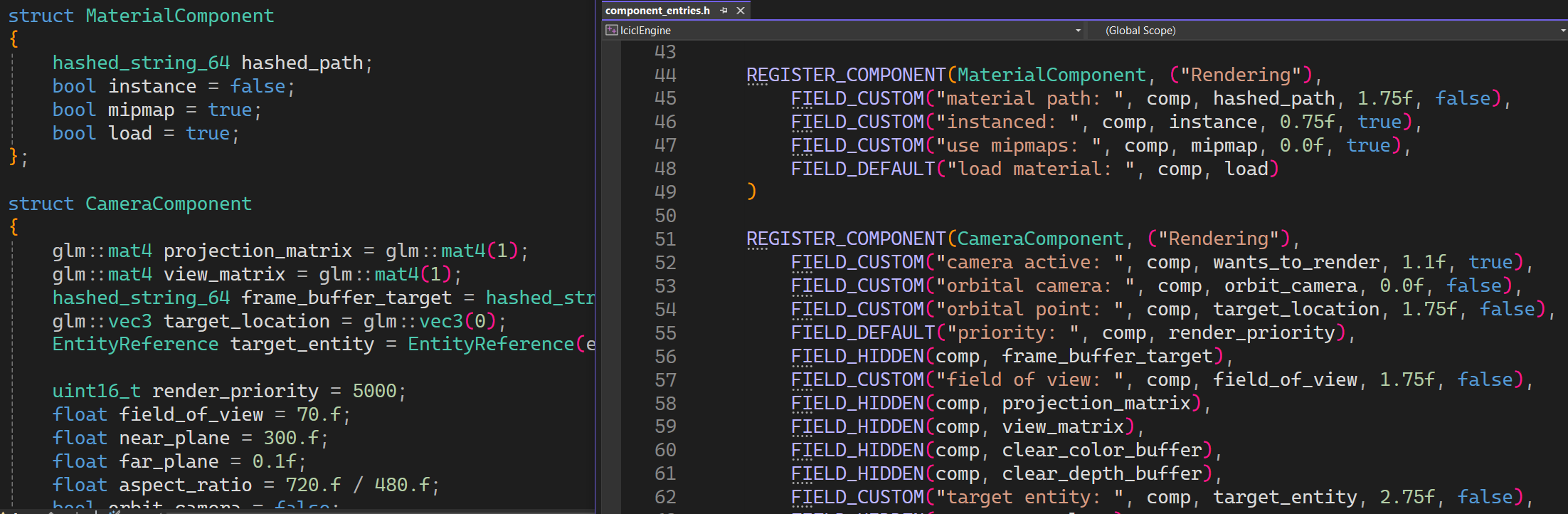
 The drawing, saving and loading, aswell as in-engine creation adding components, is done fairly simply by the 'user/programmer', by adding components and using a macro to register them into necessary registers and factory.
The drawing, saving and loading, aswell as in-engine creation adding components, is done fairly simply by the 'user/programmer', by adding components and using a macro to register them into necessary registers and factory.
 A short reel of features of the Game Engine, it's capable of making small game learning projects.
If entities do not have a renderable component, nor parenting, the limit for 60 fps is much higher than 100k entities.
A short reel of features of the Game Engine, it's capable of making small game learning projects.
If entities do not have a renderable component, nor parenting, the limit for 60 fps is much higher than 100k entities.